基于YOLO模型的路面交通标志检测研究
近年来, 越来越多的汽车厂商开始布局研发自动驾驶系统, 搭载自动驾驶系统的新 能源汽车受到了许多消费者的喜爱。交通标志检测技术是自动驾驶中的核心技术之一, 因此路面交通标志检测技术在辅助驾驶与自动驾驶领域中有着重要的应用价值。路面上 的交通标志通常是指人行横道、直行箭头、自行车道标志等,它们被直接绘制于道路表 面, 具有尺寸小、形状多样、 所处环境复杂的特点,使用传统的目标检测方法来检测时 在检测精度和泛化能力上还有一定的提升空间。 因此,本文基于 YOLOv8 目标检测模型 设计了一个专门面向路面交通标志检测的模型,并且在公开的 CeyMo 数据集上进行了 充分的实验与分析。
本文在原始 YOLOv8 模型的基础上进行了两方面的改进,首先引入了 iAFF(iterative Attentional Feature Fusion)迭代注意力特征融合来帮助模型更有效地融合不同层级的特 征;另外采用 Dynamic Head 检测头替换原有模型的检测头让模型能够更准确的检测目 标。进行消融实验时本文选用开源的 CeyMo 数据集, 它包含了直行箭头、左转箭头、 人行横道、公交车道、自行车道等 11 种常见的路面交通标志。 根据实验结果, 本文改进后的模型在检测精度上有着很大的提升,虽然 FPS 略有下 降, 但在可接受范围内。原始 YOLOv8 模型在引入 iAFF 迭代注意力特征融合后 mAP@50 和 mAP@75 分别提升了 0.87%和 1.70%;在更换 Dynamic Head 检测头后 mAP@75 提升 高达 2.41%。
这证明了在 YOLOv8 模型中采用迭代注意力特征融合和 Dynamic Head 检测头的改 进方法是有效的, 本文改进后的模型可以在自动驾驶场景下实现更高精度的路面交通标 志检测。
关键词: YOLOv8;路面交通标志检测; CeyMo 数据集; iAFF; Dynamic Head
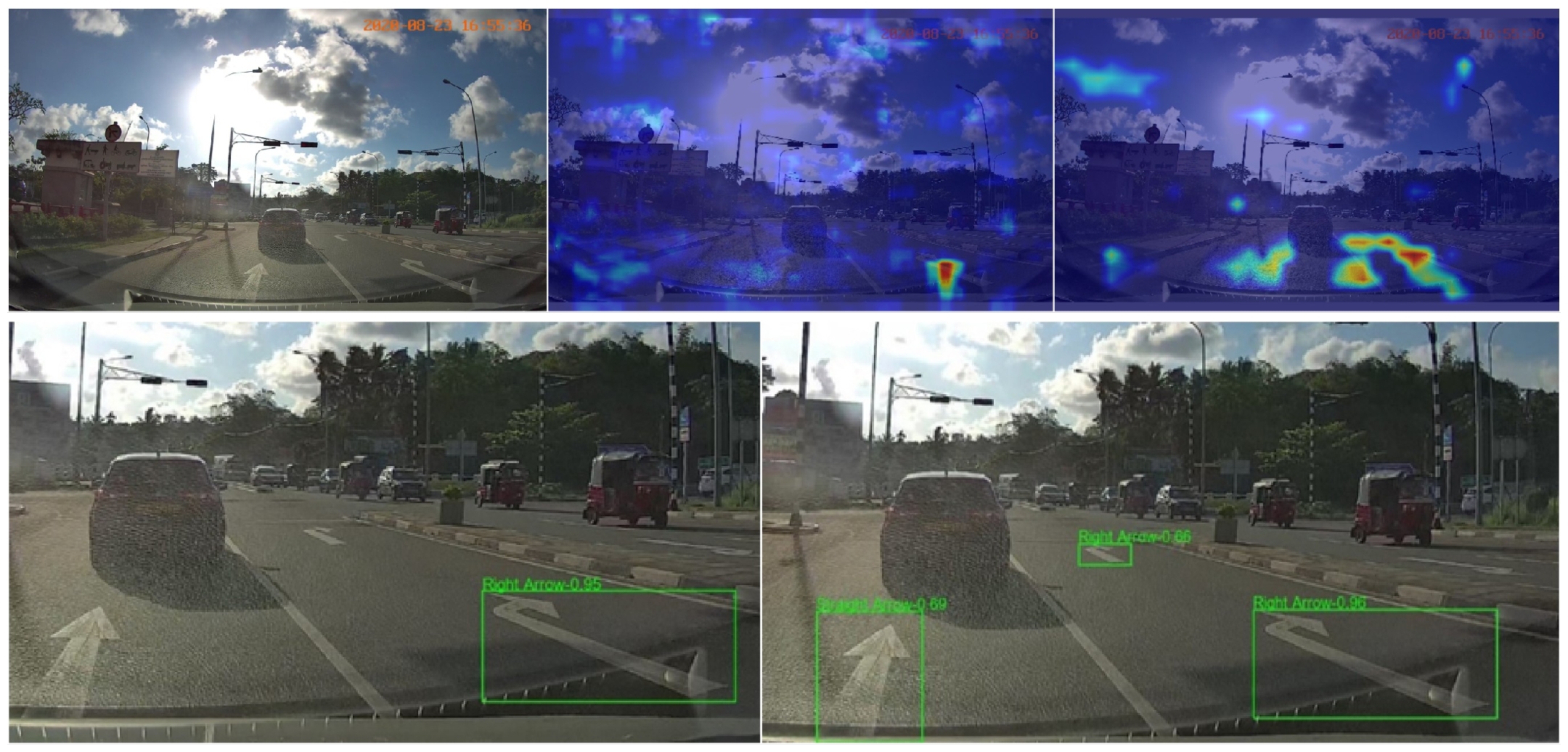
改进前后对比
Xia Endong | 2025年5月10日
上面的三张图片从左到右依次为原图, baseline和改进模型的热力图。下面两张为 baseline 和 改进模型 的实际检测 效果图。在图中路面上的三个箭头存在着明显的地面反光干扰,直行箭头在图中被遮 挡了一部分,而最远处的直行箭头为小目标。从图中可以明显看 到 baseline 模型在此场景下没有检测到被遮挡一部分的直行箭头和远处的右转箭头小目 标。而改进后的模型检测到了它们,遮挡目标检测信心为0.69,远处小目标检测信心为0.66,检测效果明显好于 baseline 的 漏检表现。